Drehzahlmessung mit einem Stroboskop
Berührungslose Messung — reziproke Messung
Grundlagen der Winkelmessung mit Inkrementalgebern
Auswertung von Inkrementalgeber-Signalen
Grundlagen der Winkelmessung mit Resolvern
Auswertung von Resolver-Signalen mit einem Resolver-Digital-Converter (RDC)
Auswertung von Resolver-Signalen mit dem Analog-Digital-Converter (ADC)
Low-Cost-Schaltung — Resolverauswertung mit dem Capture-Timer einer MCU
Optischer Sensor für einen Moviport C118 Handtacho

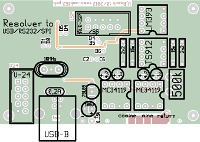
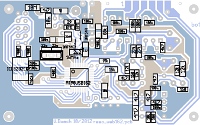
Low-Cost-Schaltung für die Resolverauswertung mittels Capture-Timer
Die Auswertung eines Resolvers kann auch ohne eine aufwändige synchronisierte Abtastung und, vor allem, ohne Verwendung trigonometrischer Funktionen durchgeführt werden. Hierzu werden Primär- und Sekundärwicklungen in ihrer Funktion vertauscht. Legt man an die Statorwicklungen zwei um 90° phasenverschobene Wechselspannungen, ein sogenanntes Quadratursignal an, so wird in der Rotorwicklung eine Wechselspannung induziert, deren Phasenverschiebung gegenüber den angelegten Eingangsspannungen linear vom Rotorwinkel abhängt.
Sowohl die Erzeugung der beiden angelegten Wechselspannungen, als auch die Messung der Phasenverschiebung kann ein einfacher Mikrocontroller bewerkstelligen. Das Quadratursignal wird von der Compare-Unit mit Hilfe zweier Interruptfunktionen erzeugt. Diese verändern jedoch nur die Zeitpunkte der folgenden Compare-Ereignisse, so dass die nicht deterministische Latenzzeit der Ausführung der Interruptroutine zu keinem Phasenfehler des Quadratursignals führt. Die Messung der Phasenverschiebung erfolgt durch die Capture-Unit, vollständig in Hardware. Lediglich das Auslesen des Ergebnisses aus dem Capture-Registers erfolgt durch eine Interruptfunktion.
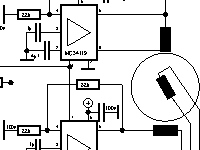
Die beiden Rechtecksignale des Quadratursignals werden durch aktive Tiefpassfilter von ihren Oberschwingungen befreit und über Audio-Brückenendstufen an die Primärwicklungen angelegt. Das Ausgangssignal der Rotorwicklung wird über einen Komparator mit kleiner Hysterese in ein Rechtecksignal umgewandelt, welches anschließend direkt der Capture-Unit zugeführt werden kann. Das Layout ist zweiseitig ausgeführt, um eine abschirmende Massefläche zu ermöglichen. Die Schaltung stellt das Lagesignal sowohl an einer RS232-Schnittstelle zur Verfügung als auch via USB CDC-Device.
Der Betreiber dieser Seiten bietet die Entwicklung entsprechender kundenspezifischer Schaltungen an.
Aktualisiert: 2022-03-01