Drehzahlmessung mit einem Stroboskop
Berührungslose Messung — reziproke Messung
Grundlagen der Winkelmessung mit Inkrementalgebern
Auswertung von Inkrementalgeber-Signalen
Grundlagen der Winkelmessung mit Resolvern
Auswertung von Resolver-Signalen mit einem Resolver-Digital-Converter (RDC)
Auswertung von Resolver-Signalen mit dem Analog-Digital-Converter (ADC)
Low-Cost-Schaltung — Resolverauswertung mit dem Capture-Timer einer MCU
Optischer Sensor für einen Moviport C118 Handtacho
Auswertung von Inkrementalgeber-Signalen
Beispielhaft für die Auswertung von Inkrementalgeber-Signalen
wird hier eine Schaltung vorgestellt, welche die drei Ausgangssignale eines
Inkrementalgebers, A, B und Idx decodiert und in
Form zweier analoger Signale als Absolutwert des Winkels und der Drehzahl
ausgibt.
Eine solche Baugruppe kann beispielsweise für die Überwachung eines Antriebs
hilfreich sein.
So wäre es möglich, Rotorwinkel und -Drehzahl als analoge Signale schnell
und ergonomisch mittels eines Oszilloskops darzustellen oder aufzuzeichnen
und so als Referenz für weitere Messwerte zu verwenden.
Die Inkrementalgeber-Signale können an einem bestehenden Antrieb sehr einfach
rückwirkungsfrei abgegriffen werden, beispielsweise über Optokoppler oder
digitale Isolatoren, wie z.B. die ADUM-Familie.
In der vorliegenden Schaltung werden die beiden analogen Signale mittels
eines Mikrocontrollers (MCU) erzeugt. Viele MCUs können Counter-Baugruppen direkt
aus den beiden Signalen des Inkrementalgebers speisen. Teilweise wird sogar
die Auswertung des Indexsignals in Hardware durchgeführt, so dass keine
Latenzzeiten auftreten können, wie sie beispielsweise bei der Implementierung
mittels Interrupts unvermeidbar sind.
Winkelmessung
Die abgebildete Schaltung zeigt einen entsprechend konfigurierten
Mikrocontroller. Der aktuelle Wert des Winkelzählers wird direkt an den
Digital-Analog-Umsetzer (DAC) übertragen, so dass der Rotorwinkel als
analoges sägezahnförmiges Signal zur Verfügung steht. Besitzt der
angeschlossene Inkrementalgeber ein Indexsignal, so steht nach spätestens
einer Umdrehung der absolute Rotorwinkel zur Verfügung. Gegebenenfalls
kann die Ausgabe des Rotorwinkels bis zum Auftreten des Indexsignals
unterdrückt werden.
Mit zwei weiteren Zählern kann die Frequenz der Gebersignale und damit die
Drehzahl des Antriebs ermittelt werden. In Verbindung mit der Zählrichtung
des Winkelzählers kann nun die Drehzahl des Antriebs ebenfalls über einen
DAC als Analogsignal ausgegeben werden.
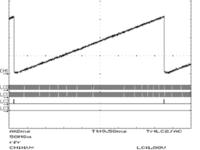
Das nebenstehende Oszillogramm (anklicken für vergrößerte Darstellung)
zeigt das sägezahnförmige analoge Winkelsignal (CH1) einer entsprechenden
Schaltung.
Darunter folgen als Referenz die beiden Encodersignale A (LC0) und,
um 90° phasenverschoben, B (LC1).
Der dritte Logikkanal (LC2) zeigt das zugehörige Indexsignal, welches
erforderlich ist, um den absoluten Winkel zu ermitteln.
Durch Verwendung einer Direct Memory Access Baugruppe (DMA) des
Mikrocontrollers kann der Rotorwinkel mit einer definierten Frequenz
aktualisiert werden. Dieses Signal ist dann auch echtzeitfähig.
Drehzahlmessung
Auch die Messung der Drehzahl, bzw. der Frequenz, könnte durch Verwendung
eines Capture-Zählers in Verbindung mit der DMA Baugruppe in einem festen
Zeitraster erfolgen.
Dieser Ansatz ist jedoch nicht empfehlenswert, da Störungen und Jitter auf
den Encodersignalen zu erheblichen Verfälschungen der erfassten Drehzahl
führen können. Vorteilhaft ist eine Durchführung der Drehzahlmessung der
über mehrere Signalperioden hinweg, wie im Abschnitt zur Drehzahlmessung
beschrieben, beispielsweise mit dem dort erklärten reziproken Messverfahren.
Die daraus resultierende längere Messdauer relativiert sich durch die Tatsache,
dass sich die Drehzahl eines Antriebs aufgrund des Massenträgheitsmoments nicht
sprungartig ändern kann.
Hierfür wäre eine unendlich große Leistung des Antriebs erforderlich.
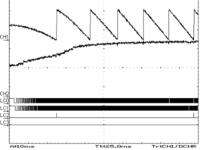
Das nebenstehende Oszillogramm (anklicken für vergrößerte Darstellung)
zeigt als oberste Kurve (CH1) das bereits bekannte analoge Lagesignal.
Darunter (CH2) liegt nun das analoge Drehzahlsignal.
Dargestellt ist der Hochlaufvorgang des Antriebs mit Inkrementalgeber.
Da die Auswertungselektronik bereits vom vorhergehenden Anlaufvorgang
initialisiert war, beginnt das Winkelsignal vom vorhergehenden Endwert aus.
Das Drehzahlsignal startet von Nullwert aus, der sich in der Mitte zwischen
positiver und negativer Maximaldrehzahl befindet.
Beide Signale wurden, wie beschrieben, von einem Mikrocontroller erzeugt.
Die fehlenden Index-Signale sind dem Aliasing geschuldet.
Die Entwicklung entsprechender kundenspezifischer Schaltungen wird vom Betreiber dieser Seiten explizit angeboten.