Drehzahlmessung mit einem Stroboskop
Berührungslose Messung — reziproke Messung
Grundlagen der Winkelmessung mit Inkrementalgebern
Auswertung von Inkrementalgeber-Signalen
Grundlagen der Winkelmessung mit Resolvern
Auswertung von Resolver-Signalen mit einem Resolver-Digital-Converter (RDC)
Auswertung von Resolver-Signalen mit dem Analog-Digital-Converter (ADC)
Low-Cost-Schaltung — Resolverauswertung mit dem Capture-Timer einer MCU
Optischer Sensor für einen Moviport C118 Handtacho
Winkelmessung mit dem Inkrementalgeber — Grundlagen
Der einfachste Lagegeber für (elektrische) Antriebe ist der
Inkrementalgeber. Er misst nicht den absoluten Winkel der Rotors bzw. dessen
Welle, sondern lediglich die (inkrementale) Änderung des Winkels um eine
definierte Schrittweite. Hierzu werden meist Gabel- bzw.
Reflexlichtschranken oder Magnetsensoren (Hallsensoren) in Verbindung mit
einem passenden Gebersystem verwendet. Die Geber sind dann meist Scheiben
mit Schlitz- oder Lochblenden bzw. reflektierenden Markierungen oder
entsprechend hochpolig auf ihrer Oberfläche magnetisierte Permanentmagnete.
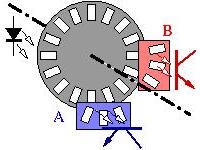
Bei optischen Gebersystemen kann die Auflösung auch kleiner sein als die
mechanische Ausdehnung des Sensorelements, indem vor dem Sensor ein Gitter
mit mehreren Schlitzblenden angebracht wird. Diese Schlitze entsprechen
denen der Geberscheibe in Abmessung und Winkelteilung. In der
nebenstehenden Abbildung ist dieser Zusammenhang vereinfacht dargestellt.
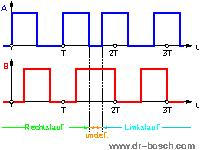
Verwendet man zwei Gebersysteme, die räumlich um ein Viertel einer Periode,
also um 90°, gegeneinander verschoben wurden, kann nicht nur die Änderung
des Winkels erfasst werden, sondern auch die Drehrichtung. Hierzu wird die
Phasenfolge der beiden resultierenden Ausgangssignale ausgewertet. Diese sind
ebenfalls um 90° gegeneinander versetzt, wie in der nebenstehenden Abbildung
dargestellt. Im einfachsten Fall kann die Auswertung der
Drehrichtung mit einem D-Flipflop erfolgen. Hierzu wird das Gebersignal
A an den Dateneingang (D) des Flipflops gelegt.
Das Signal B wird mit dem Takteingang (Clk) verbunden.
Der Pegel des Ausgangs (Q) zeigt nun an, ob sich
die Geberscheibe des Sensors im Rechts- oder Linkslauf bewegt.
Nachteilig ist bei diesem Verfahren, dass die Auswertung lediglich ein
einziges Mal pro Signalperiode erfolgt, nur bei der aktiven Flanke des
Taktsignals.
Betrachtet man beide Gebersignale, stellt man fest, dass die Signale
in einer Periode, wie beispielsweise dem Intervall [0, T] vier Zustände
codieren. Es ist also möglich die Drehrichtung vier mal pro Signalperiode
zu erkennen.
Anstatt nun die vier Taktflanken einer Periode mit vier D-Flipflops
auszuwerten, empfiehlt es sich, einen Zustandsautomaten zu entwerfen.
Hierzu werden die beiden Gebersignale durch ein drittes Signal, die
Drehrichtung, ergänzt.
Somit kann der Zustandsautomat acht Zustände unterscheiden: S0R,
S1R, S2R, S3R, S0L, S1L, S2L
und S3L.
Die Buchstaben R und L codieren die Drehrichtung
als Rechts- bzw. Linkslauf. Im Rechtslauf wäre dann die Folge der Zustände
S0R→S1R→S2R→S3R→S01…
Wird nun beispielsweise aus dem Zustand S1R der Zustand S0
erkannt, liegt eine Äderung der Drehrichtung vor und der Automat nimmt
den Zustand S0L an, anstatt des Zustandes S2R.
Der große Nachteil eines Inkrementalgebers ist, dass der absolute Winkel
nicht bekannt ist. Als einfache und preiswerte Abhilfe bieten zahlreiche
kommerziell erhältliche Geber ein drittes Signal an, welches nur während einer
einzigen Periode der beiden Gebersignale A und B aktiv wird, das sog.
Indexsignal. Nach spätestens einer Umdrehung ist dann der absolute Rotorwinkel
bekannt.
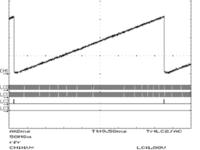
Das nebenstehende Oszillogramm zeigt die Signale eines entsprechenden
Inkrementalgebers (vergrößerte Darstellung durch anklicken), wobei das erste,
sägezahnförmige Signal (CH1) als Referenz den absloluten Winkel als analogen Wert
darstellt.
Darunter folgen die beiden Encodersignale A (LC0) und, um 90° phasenverschoben,
B (LC1). Der dritte Logikkanal (LC2) zeigt das erwähnte Indexsignal. Dieses ist
genau dann aktiv, wenn der Winkel der Inkrememntalgeberwelle von nahezu 360° auf 0°
springt.
Bei sicherheitsrelevanten Antriebssystemen erfolgt vor dem eigentlichen Anlauf
des Antriebs eine sogenannte Referenzfahrt mit reduzierter Drehzahl (und
Drehmoment), bis ein Indexsignal erkannt wurde.